用 Numba 學 CUDA! 從入門到精通 (下)
/ 42 min read
–views Updated:Table of Contents
本系列文介紹如何使用 Numba 來進行 CUDA 編寫,這是系列文的第二篇,前面的內容請參考: 用 Numba 學 CUDA! 從入門到精通 (上)
2026/05/30:因為上集都大改了,所以秉持著不能虎頭蛇尾的原則,下集也是 2026 超級重製版!甚至兩張封面圖都用 AI 改成高畫質了~
還重畫了一些示意圖,一錯錯兩年,你看悲不悲傷 🥲
GPU 謎題
前一篇我們已經把 CUDA 的基本程式設計模型走過一輪,從 Map、Zip 一路寫到 Guard、多區塊、共享記憶體。
這一篇就要拿這些工具來實際打怪了,從池化、內積、卷積、前綴和、軸向求和,一路寫到矩陣乘法,把這些深度學習中常見的演算法一個一個翻譯成 CUDA 的版本。
再次提醒,還沒打開習題的小朋友請去 GPU Puzzles 用 Colab 開起來挑戰看看 (記得 Runtime 要使用 GPU)。
謎題完整的解答可以在我的 Repo 找到,解完也記得回來看看詳解哦。
Puzzle 9 — Pooling
這題要我們實作池化 (Pooling) 運算,這是 CNN 中很常見的操作之一,常用來降採樣 (Downsampling)、擴大感受視野 (Receptive field)。
從 pool_spec 的 out[i] = a[max(i - 2, 0) : i + 1].sum() 可以看出這題的池化規則是「自己加上前兩個元素」。
但仔細一想就會發現,這樣每算一個輸出,全域記憶體就得讀 3 次 (a[max(i-2, 0)]、a[max(i-1, 0)] 和 a[i])。
如果 SIZE 變成幾百萬,那這個讀取量就會非常驚人,這是不好的:

所以這時候就輪到上一題剛學會的共享記憶體派上用場啦,把資料先一次性搬進共享記憶體,後面要重複用時就到共享記憶體拿就好,不必再去打擾全域記憶體:
TPB = 8
def pool_test(cuda): def call(out, a, size) -> None: # 共享記憶體的大小設為 TPB,剛好對應一個區塊負責的 TPB 筆資料 shared = cuda.shared.array(TPB, numba.float32)
# 全域索引值,負責寫入 out 的正確位置 i = cuda.blockIdx.x * cuda.blockDim.x + cuda.threadIdx.x # 區塊內索引值,負責對應到共享記憶體裡的位置 local_i = cuda.threadIdx.x # FILL ME IN (roughly 8 lines) if i < size: # 先載入共享記憶體 shared[local_i] = a[i] # 等大家都載完 cuda.syncthreads() # 之後的讀取通通走共享記憶體,邊界用 max 處理 out[i] = shared[max(local_i-2, 0)] + shared[max(local_i-1, 0)] + shared[local_i] return call值得注意的是,雖然這裡只有一個區塊、且共享記憶體的長度跟區塊內執行緒數量一樣,我們還是要把全域索引值 i 跟區塊內的索引值 local_i 分清楚 — 全域索引值用來定位輸入跟輸出,區塊內索引值用來定位共享記憶體。
從視覺化可以看到全域記憶體真的就只有讀寫各一次,剩下都被共享記憶體吃下來了:
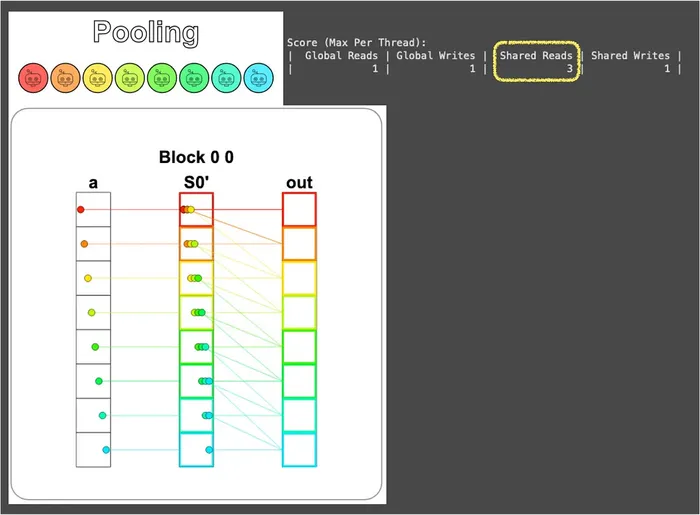
雖然全域記憶體的讀取次數只是從 3 → 1 而已,但要知道這個比例會隨著運算的複雜度被放大。
舉例來說,如果把池化窗口從 3 拉到 100 (圖像處理裡常見的尺寸),每個輸出原本得跑 100 趟全域記憶體,搬進共享記憶體之後就只需要 1 趟,「資料盡量待在快的記憶體裡」這條原則的威力也就顯現出來啦。
Puzzle 10 — Dot Product
從這題開始稍微有點挑戰性囉!
題目要我們實作內積,也就是把對應位置的元素相乘後加總。
這件事可以拆成兩個步驟來想:
- 對應位置相乘: 這部分相對簡單,我們可以在把資料載入共享記憶體的同時完成相乘,實作時只需要把上一題的程式碼稍加修改就好。
- 相乘後的元素加總: 這就麻煩了,怎麼讓 8 個執行緒合作把 8 個值加成 1 個值?
幸好這裡題目很貼心地給了個提示:「先不要在意共享記憶體的讀取次數,之後會學到更好的做法」。
那我們就恭敬不如從命,這次先粗暴一點,挑一個執行緒出來,請它把所有東西串成一串加起來吧:
TPB = 8def dot_test(cuda): def call(out, a, b, size) -> None: shared = cuda.shared.array(TPB, numba.float32)
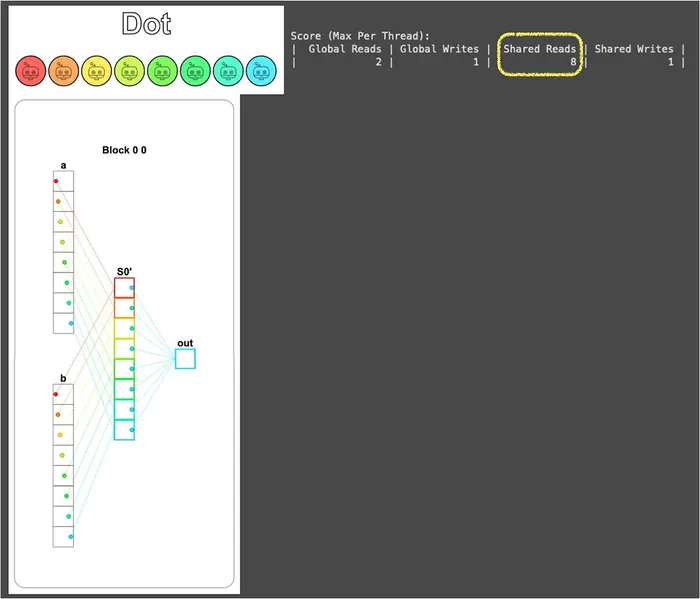
i = cuda.blockIdx.x * cuda.blockDim.x + cuda.threadIdx.x local_i = cuda.threadIdx.x # FILL ME IN (roughly 9 lines) if i < size: # 在把資料載入共享記憶體的同時完成乘法運算 shared[local_i] = a[i] * b[i] cuda.syncthreads() # syncthreads 確保資料都在共享記憶體中了 # 挑 TPB - 1 號執行緒當代表 (純粹是因為視覺化的顏色漂亮) # 請它負責把所有數值加起來並寫入 out if local_i == TPB - 1: sum = 0 for idx in range(size): sum += shared[idx] out[0] = sum return call從視覺化的結果可以看到藍色 (TPB - 1 號) 執行緒一個人扛起加總的責任,其它 7 個執行緒在完成自己的乘法之後就閒著,因此 Shared Reads 來到了 8 次:
到這裡解答其實就完成了,但這個做法有兩個非常明顯的浪費:
- 嚴重序列化:8 個執行緒裡只有 1 個在做加總,其它 7 個都閒著,平行運算的精神蕩然無存。
- 資料被重複讀:還記得 Puzzle 5 (Broadcast) 結尾埋的伏筆嗎?在那裡我們說「同一筆資料被多少執行緒重複拿」會放大讀取成本。
而這題情境雖然是一個執行緒讀很多筆,但本質上跟多個執行緒讀同一筆資料是一樣的,都有「讀取量沒有跟著平行化降下來」的問題。
那有沒有更好的辦法?會這樣問當然有啦,先賣個關子,等我們把後面卷積一題啃下來之後,在 Puzzle 12 解開這個謎。
Puzzle 11 — 1D Convolution
這題要做一維卷積,但在解題之前,先來拆解 conv_spec 確認一下我們對卷積的理解是否與題目相同:
def conv_spec(a, b): out = np.zeros(*a.shape) b_len = b.shape[0] for i in range(a.shape[0]): out[i] = sum([a[i + j] * b[j] for j in range(b_len) if i + j < a.shape[0]]) return out可以看出這裡的 a 是輸入向量、b 是卷積核 (Kernel),而輸出 out 中位置 i 的值是透過「將 b 的開頭卡在 a 的位置 i,再把對應元素相乘後加總」得來。
這個運算可以用下圖表示:
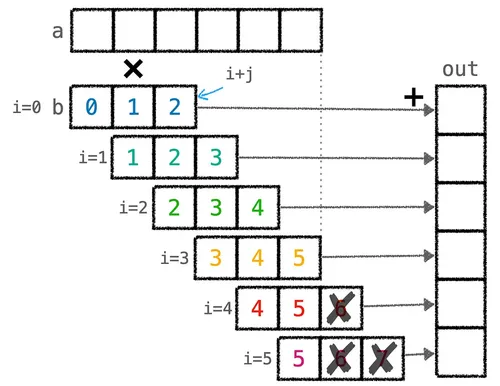
從圖中可以看到,這題的卷積在卷積核超出 a 尾端時會自動補零 (if i + j < a.shape[0]),因此實作這題的關鍵在於正確處理卷積核滑到尾端、超過 a 的情況。
根據這個思路,配合題目的提示 (要支援任意大小的輸入向量與卷積核),可以先寫出第一版的解法:
MAX_CONV = 4 # 卷積核尺寸的上限TPB = 8 # 每個區塊的執行緒數量TPB_MAX_CONV = TPB + MAX_CONV # = 12,共享記憶體的總長度def conv_test(cuda): # a_size: 輸入向量 a 的長度 # b_size: 卷積核 b 的實際長度 (<= MAX_CONV) def call(out, a, b, a_size, b_size) -> None: i = cuda.blockIdx.x * cuda.blockDim.x + cuda.threadIdx.x local_i = cuda.threadIdx.x
# FILL ME IN (roughly 17 lines) # 建立能放下輸入陣列與卷積核的共享記憶體 shared = cuda.shared.array(TPB_MAX_CONV, numba.float32) # 將輸入陣列放入共享記憶體 (前 TPB = 8 個位置) if i < a_size: shared[local_i] = a[i] # 將卷積核放在執行緒長度之後的共享記憶體 (後 MAX_CONV = 4 個位置) # 這部分讓區塊前 b_size 個執行緒來負責就好 if local_i < b_size: shared[TPB + local_i] = b[local_i] # 同步一下,確保資料都進去共享記憶體了 cuda.syncthreads() # 計算卷積 sum = 0 for j in range(b_size): # 判斷卷積核是否會超過向量 a 以及共享記憶體中本區塊複製的向量 a if local_i + j < a_size and local_i + j < TPB: sum += shared[local_i + j] * shared[TPB + j] # 寫到輸出 if i < a_size: out[i] = sum return call這個解法的核心想法是把 a 跟卷積核 b 一起塞進同一塊共享記憶體:總長度 TPB_MAX_CONV = TPB + MAX_CONV = 12,前 TPB = 8 個位置放這個區塊負責的 a 那一段,後 MAX_CONV = 4 個位置放卷積核 b。
為了避免所有執行緒一窩蜂去搬卷積核 (b 只有 b_size 個元素,沒必要動用 TPB 個執行緒),這份工作交給前 b_size 個執行緒就好。
這題有兩個測試,第一個是 TPB 大於 a_size 的簡單情況 (a 完全放得進一個區塊的共享記憶體),problem.check() 按下去,輕鬆通過。
第二個測試則是 a_size 大於 TPB,所以必須動用多個區塊來分擔,一樣 problem.check() 按下去,沒過!

先別收工、別氣餒,身為工程師,我們最愛 Debug 了,深呼吸,來看看錯在哪:

只錯三個,而且都是中間幾個位置少算,還不賴,至少不是無腦寫錯,只是有些情境沒考慮到。
從下面的示意圖就能看出問題:當卷積核滑到一個區塊的尾端時,會超出該區塊載入共享記憶體的範圍 (TPB 個元素),但這時候 a 在後面其實還有值,只是這些值是由 下一個區塊 負責載入的,前面的程式碼把這部分當零來算,所以才會少算三個元素:
知道問題之後,可以從兩個方向解決:
- 直接從全域記憶體把缺失的
a讀進來,但這就違背了「把所有東西塞進共享記憶體」的初衷。 - 把缺失的
a元素也載進共享記憶體。
但做法 2 還是有個現實問題要面對,共享記憶體後面那 MAX_CONV 個位置已經被卷積核佔走了,所以實際上得做兩件事,把卷積核搬出去獨立成一塊 shared_b,然後把騰出來的位置拿來裝缺失的 a。
而騰出來的這 MAX_CONV 個位置究竟夠不夠裝,我們可以實際拿一個具體例子算算看。
假設 TPB = 8、b_size = 4,區塊載入了 a[0..7],這時候區塊最後一個執行緒 (local_i = 7) 要算 out[7],它需要 a[7], a[8], a[9], a[10] 這 4 個元素跟 b 做內積,但 a[8], a[9], a[10] 都在下一段、不在區塊內,所以缺了 3 個,剛好等於 b_size - 1。
更廣泛地說,卷積核從區塊尾端滑出去時,最多會探出 b_size - 1 個位置 (再多卷積核就完全離開區塊了),所以「缺失的 a」最多就是 b_size - 1 個。
而 b_size 又必定小於等於 MAX_CONV (MAX_CONV 是卷積核尺寸的上限),因此原本放 b 的那 MAX_CONV 個位置剛好夠裝下所有可能缺失的 a 啦!
也就是說,MAX_CONV 這個常數從一開始就是一身二用,既是卷積核的容量上限,又是「會缺失多少個 a」的上限,伏筆藏得真深啊。
那我們就選擇做法 2,再加上一個小巧思,把「載入額外 a」這個任務交給原本要載入卷積核但沒事做的執行緒 (前 b_size 個之外的那些),這樣全域記憶體的讀取次數也不會增加。
整套程式碼就會長這樣:
MAX_CONV = 4TPB = 8TPB_MAX_CONV = TPB + MAX_CONVdef conv_test(cuda): def call(out, a, b, a_size, b_size) -> None: i = cuda.blockIdx.x * cuda.blockDim.x + cuda.threadIdx.x local_i = cuda.threadIdx.x
# FILL ME IN (roughly 17 lines) # 拆成兩塊共享記憶體: # shared_a 裝這個區塊負責的 a (前 TPB 個) + 額外的 a 尾端 (後面最多 MAX_CONV 個) # shared_b 單獨裝卷積核 b shared_a = cuda.shared.array(TPB_MAX_CONV, numba.float32) shared_b = cuda.shared.array(MAX_CONV, numba.float32) # 將輸入陣列放入共享記憶體 (前 TPB 個位置) if i < a_size: shared_a[local_i] = a[i]
# 前 b_size 個執行緒負責載入卷積核到 shared_b if local_i < b_size: shared_b[local_i] = b[local_i] # 其餘執行緒 (local_i >= b_size) 負責載入額外的 a 尾端,補到 shared_a 後段 # 這樣全部執行緒都有事做,全域記憶體的讀取次數也不會增加 else: # 把編號平移 b_size,重新解讀成「我是第 0 個額外載入者」、「我是第 1 個」這樣 i_other = i - b_size local_i_other = local_i - b_size # local_i_other < b_size:最多只額外載入 b_size 個 (反正最多缺 b_size - 1 個) # TPB + i_other < a_size:避免讀到 a 的範圍外 if local_i_other < b_size and TPB + i_other < a_size: shared_a[TPB + local_i_other] = a[TPB + i_other] # 同步一下,確保資料都進去共享記憶體了 cuda.syncthreads() # 計算卷積 sum = 0 for j in range(b_size): # 判斷卷積核是否會超過向量 a (注意這裡用 i 而非 local_i) if i + j < a_size: sum += shared_a[local_i + j] * shared_b[j] # 寫到輸出 if i < a_size: out[i] = sum return call經過前面詳細的說明,這段程式碼比較不直覺的地方就剩下「索引平移」這個小動作,這裡再來額外解釋一下。
如果不做平移、直接用原本的 local_i 來算條件,會發現條件得寫成「local_i 介於 b_size 跟 2 * b_size 之間」這種兩端都要顧的範圍,而且要載入的位置 shared_a[TPB + (local_i - b_size)] 跟全域位置 a[TPB + (i - b_size)] 裡面也都得帶著 - b_size 這個尾巴,整段讀起來很雜。
但只要把編號減掉 b_size,這群執行緒就能從「local_i = b_size, b_size+1, ...」這種偏移的編號,重新編成「local_i_other = 0, 1, 2, ...」這種乾淨的順號,等於是讓他們在自己的小世界裡也是從 0 開始數,所有判斷條件跟索引就都能用最直觀的方式寫出來,跟「載入 a 到前 TPB 個位置」那段的寫法幾乎一模一樣。
最後來看一下視覺化結果,可以注意到 1D Conv (Full) 左邊區塊的 S0' 雖然載入了 a 向量的第 12 個元素,但它對該區塊負責的 Out 並沒有貢獻,這就是前面提到「額外載入的 a 不會用到」的安全冗餘:
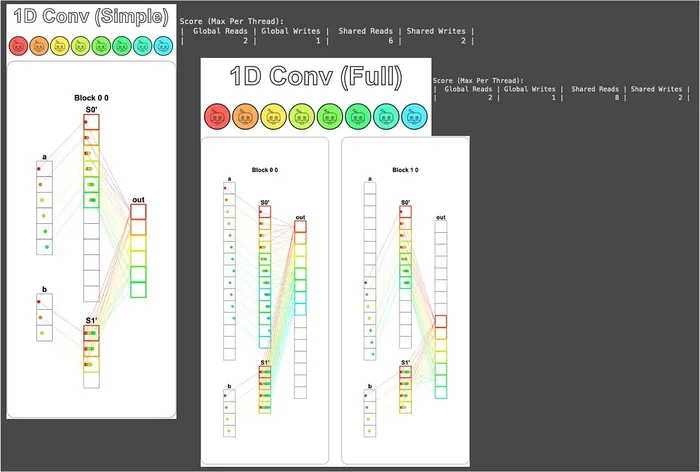
這個解法對全域記憶體的讀寫次數也符合題目要求,讚讚讚!
Puzzle 12 — Prefix Sum
還記得在 Puzzle 10 結尾埋的伏筆嗎?在那裡我說「派一個執行緒走訪所有元素」這個做法很爛,之後會有更好的演算法,說的就是這題~
題目要求我們計算 a 的總和,但如果 a 的尺寸大於區塊尺寸 (TPB),那只需要分別計算每個區塊內元素的總和並寫到 out[blockIdx.x],最後整個 array 的總和會由 Host 把這些 partial sum 再加起來,得到最終的答案。
舉個例子,如果 TPB = 8、a 的長度是 16,一個區塊吃不下,所以會動用 2 個區塊各自負責一段,最終的輸出就會是 out = [前 8 個元素的總和, 後 8 個元素的總和],Host 再把這兩個值加起來就是 a 的完整總和。
而本題演算法的正式名稱是 Blelloch Algorithm,但這題實際上只用了其前半段 Up-Sweep (Reduce) Phase。
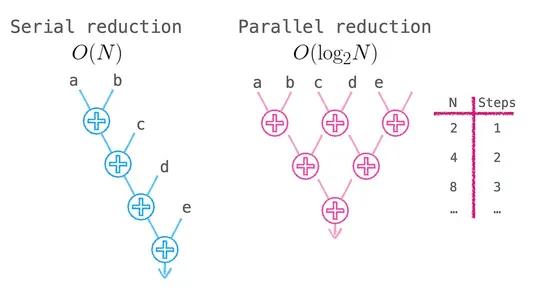
這個演算法之所以能平行化,靠的是 加法的結合律 (Associative law)。
若序列式地加總,計算會長得像 ((a + b) + c) + d,每一步都要等前一步算完才能繼續,沒辦法平行計算。
但結合律告訴我們可以把這個計算重組成 (a + b) + (c + d),這樣 a + b 跟 c + d 就能 同時 算啦。
把這招繼續推下去,每一輪都把要相加的對數減半,原本 的時間就會降成 :
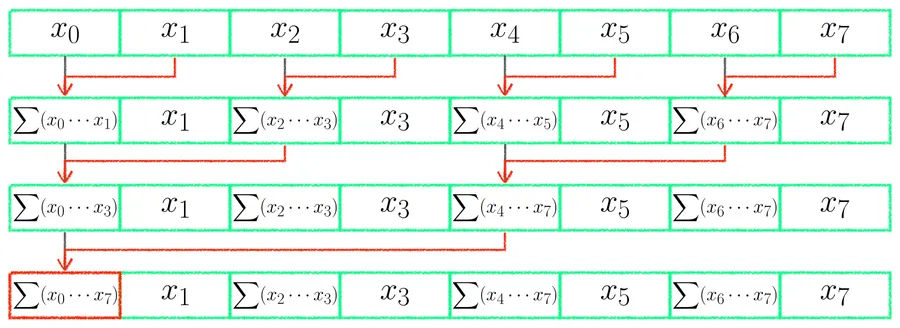
實作上每一輪都會挑出部分執行緒做相鄰相加,挑選的條件可以寫成 local_i % stride == 0,stride 從 1 開始、每輪翻倍。
舉例來說,第一輪 stride = 1,所有偶數編號的執行緒 (local_i = 0, 2, 4, 6) 動手,把自己跟距離 1 的右邊鄰居加起來;第二輪 stride = 2,只剩 local_i = 0, 4 動手,加上距離 2 的鄰居;第三輪 stride = 4,最後就只剩 local_i = 0 動手,加上距離 4 的那個,整段總和就此完成。
因為 TPB = 8,所以三輪就能搞定 ():
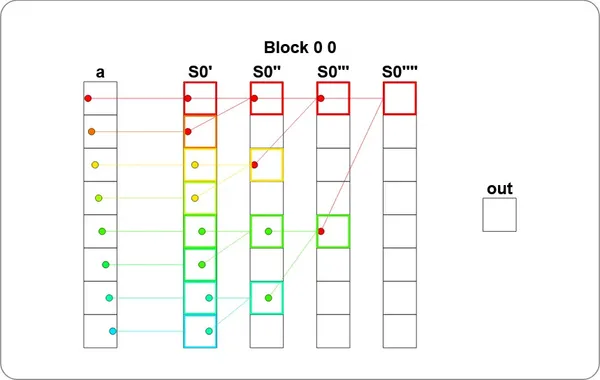
把這三輪獨立寫出來,會長這樣 (這還不是最終版,先過渡一下):
def sum_test(cuda): def call(out, a, size: int) -> None: cache = cuda.shared.array(TPB, numba.float32) i = cuda.blockIdx.x * cuda.blockDim.x + cuda.threadIdx.x local_i = cuda.threadIdx.x # FILL ME IN (roughly 12 lines) if i < size: # 把資料載入共享記憶體 (注意 index 是 local_i 而不是 i) cache[local_i] = a[i] cuda.syncthreads() # 第一輪:local_i = 0, 2, 4, 6 把自己跟距離 1 的鄰居加起來 if local_i % 2 == 0: cache[local_i] = cache[local_i] + cache[local_i + 1] cuda.syncthreads() # 第二輪:local_i = 0, 4 把自己跟距離 2 的鄰居加起來 if local_i % 4 == 0: cache[local_i] = cache[local_i] + cache[local_i + 2] cuda.syncthreads() # 第三輪:local_i = 0 把自己跟距離 4 的鄰居加起來,整段總和會落在 cache[0] if local_i % 8 == 0: cache[local_i] = cache[local_i] + cache[local_i + 4] cuda.syncthreads() return call其中 cuda.syncthreads() 在每一輪結束都要呼叫一次,因為下一輪會去讀上一輪寫進去的結果,沒同步好就會踩到別人的腳趾頭 (Race condition)。
從視覺化可以看到共享記憶體的數值流向跟示意圖一致:
不過這版有兩個地方還可以再修一下:
- 三輪的
if寫死了,如果TPB變大就要手動再加if,不通用。 - 沒處理
i >= size的情況,如果某個執行緒沒有對應的資料,它在共享記憶體裡的位置會是上次留下來的髒值,加進來就會污染整個結果。
把這兩點修一修,就是最終版解答:
def sum_test(cuda): def call(out, a, size: int) -> None: cache = cuda.shared.array(TPB, numba.float32) i = cuda.blockIdx.x * cuda.blockDim.x + cuda.threadIdx.x local_i = cuda.threadIdx.x # FILL ME IN (roughly 12 lines) # 把資料載入共享記憶體,超出 size 的執行緒就把對應位置填 0 # 因為 0 是加法的單位元素,加進去不會影響結果,這個小技巧之後也會常用到 if i < size: cache[local_i] = a[i] else: cache[local_i] = 0.0 cuda.syncthreads() # 用 while 把三輪合併成通用版本 # stride 從 1 開始、每輪翻倍 (1 → 2 → 4), # 搭配 local_i % (stride * 2) == 0 挑出這輪要動手的執行緒 stride = 1 while stride < TPB: if local_i % (stride * 2) == 0: cache[local_i] = cache[local_i] + cache[local_i + stride] cuda.syncthreads() stride *= 2
# 整段總和最後會待在 cache[0],派 local_i = 0 寫回對應的 out 位置 if local_i == 0: out[cuda.blockIdx.x] = cache[0] return call視覺化結果如下:
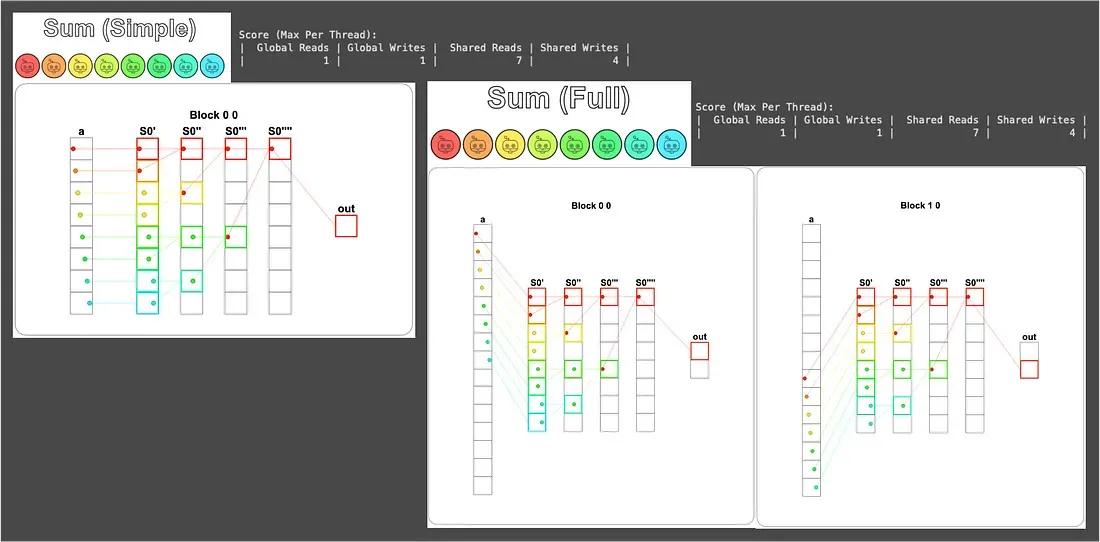
雖然這版的 Shared Reads 只比 Puzzle 10 (8 次) 少 1 (變 7 次),但別小看這 1 次。
當 TPB 變大,序列版本是 、Blelloch 是 ,到 TPB = 1024 時序列版要讀 1024 次,平行版只要 10 次,差距會大得嚇人。
而且 Blelloch 讓所有執行緒輪番上場、不會閒著,這對 GPU 來說才是更重要的事,畢竟閒置的 GPU 是我們最不想看到的。
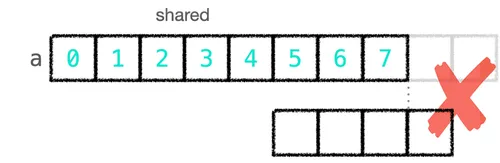
Puzzle 13 — Axis Sum
這題要做 Axis Sum (沿軸加總),相當於 PyTorch sum 函式設 dim 參數的版本。
從 sum_spec 的 out[..., j] = a[..., i : i + TPB].sum(-1) 可以看出題目要的是沿著最後一個軸加總。
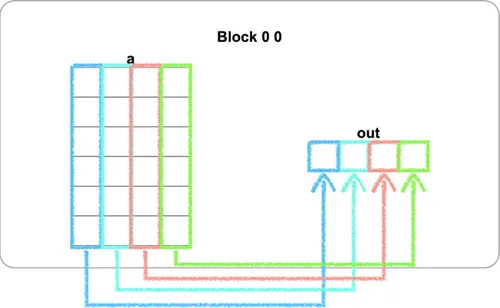
配合這次題目的 a.shape = (BATCH, SIZE) = (4, 6)、out.shape = (BATCH, 1) = (4, 1),意思就是「把每一列的 6 個元素加總成一個值」。
這裡把題目初始的視覺化加上 4 條彩色框框,以幫助理解:
實作上有個很美的轉換,仔細一看就能發現,每一 Row 的加總不就是上一題 Prefix Sum 解決的內容嗎?
所以我們只要讓每個區塊負責一 Row,內部直接套上一題的程式碼就完工了。
但要怎麼讓區塊各自對應到一 Row 呢?答案就是用 第二維 block index (cuda.blockIdx.y)。
題目這次把 blockspergrid 設成 Coord(1, BATCH),等於只在 y 方向開了 BATCH 個區塊,每個區塊都有自己唯一的 blockIdx.y,從 0 數到 BATCH - 1,剛好可以拿來當作「我負責第幾 Row」的索引值:
def axis_sum_test(cuda): def call(out, a, size: int) -> None: cache = cuda.shared.array(TPB, numba.float32) i = cuda.blockIdx.x * cuda.blockDim.x + cuda.threadIdx.x local_i = cuda.threadIdx.x # 第二維 block index,每個區塊靠這個值認領「我負責第幾 Row」 batch = cuda.blockIdx.y # FILL ME IN (roughly 12 lines) # 載入第 batch row 的對應位置到共享記憶體 # 超出 size 的執行緒一樣填 0,避免影響加總結果 (跟 Puzzle 12 同樣手法) if local_i < size: cache[local_i] = a[batch, local_i] else: cache[local_i] = 0.0 cuda.syncthreads() # 套用 Puzzle 12 的 Up-Sweep,整段總和會落在 cache[0] stride = 1 while stride < TPB: if local_i % (stride * 2) == 0: cache[local_i] = cache[local_i] + cache[local_i + stride] cuda.syncthreads() stride *= 2 # 派 local_i = 0 把這 Row 的總和寫到 out 對應的位置 if local_i == 0: out[batch, 0] = cache[0]
return call其中最關鍵的就是 batch,它讓每個區塊都知道要負責哪一 Row,剩下都是 Puzzle 12 的延伸。
視覺化結果如下 (這裡因為版面關係,放兩個區塊而已),可以看到 Block 的索引值是 (0, 0)、(0, 1)、(0, 2)、(0, 3),對應的正是 batch 所代表的 blockIdx.y:
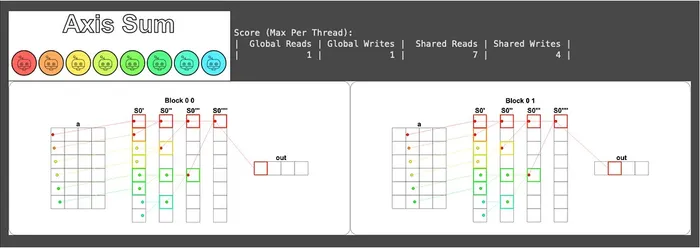
到這裡有個觀察值得我們稍微停下來想想,因為這些區塊之間完全獨立 (各自負責不同的 Row),它們會被 CUDA 排程器自動派發到不同的 SM 上 同時 跑。
這也是為什麼第一篇講的 “分進合擊” 要把問題切成獨立的小塊,因為 “獨立” 就是平行化最強的保證。
Puzzle 14 — Matrix Multiply!
終於走到最後一題啦 🥳
這題絕對可以稱得上是為本系列畫龍點睛的一題,畢竟矩陣乘法解決了,大部分深度學習演算法都能算了 (延伸閱讀:GPT in 60 Lines of NumPy)。
直觀來說,矩陣乘法 out = a @ b 中的 out[i, j] 就是 a 的第 i Row 跟 b 的第 j Col 做內積。
但這裡跟前面的題目最大的不同就是它是個 2D 問題,所以區塊與執行緒也都會用 2D 來組織,由每個執行緒負責算出一個 out[i, j]。
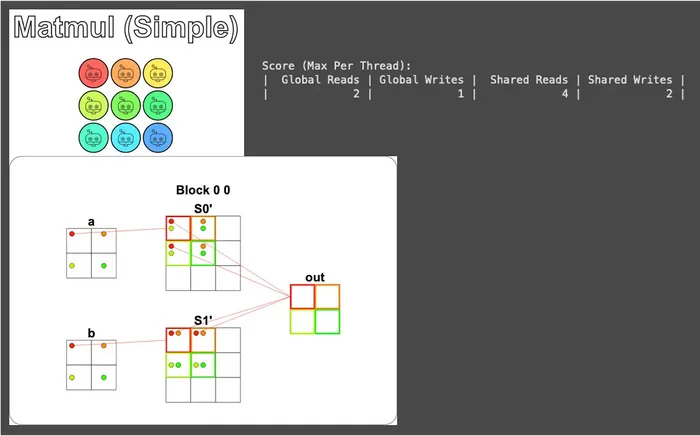
先從簡單情況講起,當整個矩陣放得下共享記憶體時,我們可以直接把 a 跟 b 全部裝進去,再讓每個執行緒做自己負責的那一個內積。
但要注意一件事,這次不能像 Puzzle 10 那樣 “邊載邊算”。 因為 Puzzle 10 是內積一個 1D 向量,每個執行緒只需要自己載入的那個位置 (a[i] * b[i]),而現在每個執行緒需要的是「自己負責的那一整 Row / 那一整 Col」,但這些位置的資料是由其他執行緒載入的,所以必須先全部載完、同步、再開始算:
TPB = 3def mm_oneblock_test(cuda): def call(out, a, b, size: int) -> None: # 兩塊 2D 共享記憶體,分別裝整個 a 跟整個 b a_shared = cuda.shared.array((TPB, TPB), numba.float32) b_shared = cuda.shared.array((TPB, TPB), numba.float32)
i = cuda.blockIdx.x * cuda.blockDim.x + cuda.threadIdx.x j = cuda.blockIdx.y * cuda.blockDim.y + cuda.threadIdx.y local_i = cuda.threadIdx.x local_j = cuda.threadIdx.y
# FILL ME IN (roughly 14 lines) if i < size and j < size: # 每個執行緒負責載入一個位置 (i, j),全部執行緒合力把 a 跟 b 都載完 a_shared[local_i, local_j] = a[i, j] b_shared[local_i, local_j] = b[i, j] # 必須等大家都載完,因為下面要讀其他執行緒載入的位置 cuda.syncthreads() # 計算 a 的第 local_i Row 跟 b 的第 local_j Col 的內積 prod = 0 for k in range(size): prod += a_shared[local_i, k] * b_shared[k, local_j] # 寫到輸出 out[i, j] = prod return call這段程式碼的重點是迴圈裡那一行 prod += a_shared[local_i, k] * b_shared[k, local_j],對於負責 out[i, j] 的執行緒來說,local_i 跟 local_j 是固定的,靠著 k 從 0 跑到 size - 1,就把 a 的第 local_i Row 跟 b 的第 local_j Col 整條都走過、做完內積。
視覺化的部分這裡只畫紅色執行緒 (設置上使用 problem.show(sparse=True)),不然會太雜:
接下來則是比較困難但更常見的情況 — 矩陣尺寸比共享記憶體尺寸還要大。
以此題來說,共享記憶體只有 TPB × TPB,所以當矩陣超出這個大小時,就沒辦法一次把整個 a 跟 b 裝進去,必須改用分塊載入的方式,把 a 跟 b 拆成一塊一塊輪流載入共享記憶體,並把每一塊算出來的部分內積累加起來,跑完所有塊之後 prod 就是完整的內積值:
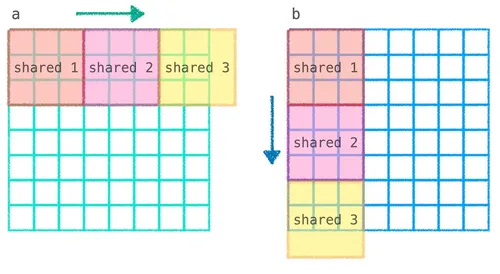
從上圖可以看到,計算 out[i, j] 需要 a 第 i Row 的整條跟 b 第 j Col 的整條做內積,但因為兩條都裝不進共享記憶體,所以必須拆成「載入 a 的一段 + b 的一段 → 算這段的內積 → 累加到 prod → 再載下一段」這樣疊代地將局部內積累積到總和的流程:
TPB = 3def mm_oneblock_test(cuda): def call(out, a, b, size: int) -> None: a_shared = cuda.shared.array((TPB, TPB), numba.float32) b_shared = cuda.shared.array((TPB, TPB), numba.float32)
i = cuda.blockIdx.x * cuda.blockDim.x + cuda.threadIdx.x j = cuda.blockIdx.y * cuda.blockDim.y + cuda.threadIdx.y local_i = cuda.threadIdx.x local_j = cuda.threadIdx.y # FILL ME IN (roughly 14 lines) # prod 在每輪疊代外面初始化,這樣每塊算出來的部分內積才能累加上去 prod = 0 # 無條件進位算出要跑幾輪疊代 (因為 size 不一定整除 TPB) # 例如 size = 8、TPB = 3 時,要 3 輪才能跑完 (3 + 3 + 2) blocks = size // TPB + bool(size % TPB) # block 在這裡代表「目前處理到第幾塊」,從 0 數到 blocks - 1 for block in range(blocks): # b_i、b_j 是「目前這一塊」在原始矩陣 a / b 中對應的位置 # 第 block 塊就把 a 的第 block 段、b 的第 block 段拉進共享記憶體 b_i = block * cuda.blockDim.x + cuda.threadIdx.x b_j = block * cuda.blockDim.y + cuda.threadIdx.y # 載入 a 的這一塊:固定 Row i (這個執行緒負責的)、跨 Col 跟著 block 跑 if i < size and b_j < size: a_shared[local_i, local_j] = a[i, b_j] # 載入 b 的這一塊:跨 Row 跟著 block 跑、固定 Col j if b_i < size and j < size: b_shared[local_i, local_j] = b[b_i, j] cuda.syncthreads() # 計算這一塊的內積並累加到 prod # 內迴圈最多跑 TPB 次,但最後一塊可能不滿 TPB,所以用 min 限制 for k in range(min(TPB, size - block*TPB)): prod += a_shared[local_i, k] * b_shared[k, local_j] # 所有塊都跑完之後,prod 就是完整內積,寫到輸出 if i < size and j < size: out[i, j] = prod
return call這整段比較不直覺的地方只有 b_i 跟 b_j 的計算,所以再單獨拉出來解釋一下。
對於負責 out[i, j] 的執行緒來說,它要拿到的是 a 的第 i Row、b 的第 j Col,這兩個值在整段運算中是固定的。
變的是「目前處理到 Row / Col 的哪一段」,這就是 b_i 跟 b_j 的角色,隨著 block 增加,這兩個值會跟著往後移動 TPB 個位置,剛好對應到 a 第 i Row 的下一段、b 第 j Col 的下一段。
所以載入 a 時 Row 固定用 i、Col 跟著 b_j 跑;載入 b 時 Row 跟著 b_i 跑、Col 固定用 j。
困難的測試案例使用了 8×8 矩陣,搭配 3×3 個尺寸為 3×3 的區塊處理,這裡只放第一個與最後一個區塊的運算視覺化,其餘部分可依此類推:
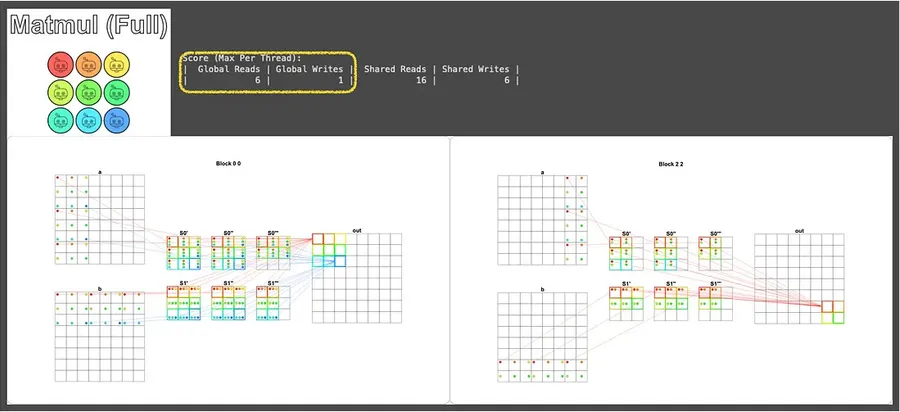
可以看到這裡只花了 6 次的全域記憶體讀取,已經是符合題目要求的做法了!
結語
恭喜各位看到這裡的小朋友,我們一起完成了 14 個謎題,從最基本的 Map、Zip 出發,一路走過 Guard、多區塊、共享記憶體,最後打通了卷積、平行歸約、矩陣乘法。
而支撐這趟旅程的核心心法,其實就只有以下幾條:
- 每筆資料配一個執行緒:先想單一個執行緒要做什麼,再讓硬體幫我們開出一大堆同時跑。
- 執行緒比資料多就用 Guard 擋掉:避免越界,也避免某些執行緒拿髒值來污染運算。
- 熱資料盡量待在快的記憶體裡:能用共享記憶體就別反覆讀全域記憶體。
- 共享記憶體配
syncthreads():寫入後、讀取前一定要同步,否則 Race condition 等著你。 - 把問題切成獨立的小塊:區塊之間越獨立,GPU 越能自由地分派到不同 SM 平行處理。
掌握這幾條,再加上前一篇講的 Thread / Block / Grid 階層架構,遇到新的演算法時,大多都能套出一個堪用的 CUDA 版本。
而如果想再往前一步,可以考慮看看:
- NUMBA CUDA Guide:本系列只是入門,Numba 還有 Atomic Operations、Cooperative Groups、CUDA Streams 等進階主題。
- Apache TVM 與 OpenAI Triton:跳脫硬體框架的高階寫法,讓你不必每個架構都重寫一遍。
- CUTLASS:NVIDIA 自家的高效能矩陣乘法函式庫原始碼,看完保證對 Puzzle 14 的「進階版」充滿敬意。
最後,各位阿瑋大軍,辛苦了!我們下次見啦~
